


-
dota2竞猜就认准雷竞技 行业 dota2竞猜就认准雷竞技 导读:1月11日,全球标志性科技品牌荣耀与保时捷设计在上海发布荣耀MagicV2RSR保时捷设计,这标志着全球先锋科技公司与奢华生活方式品牌合作达... 浏览量:2051 -
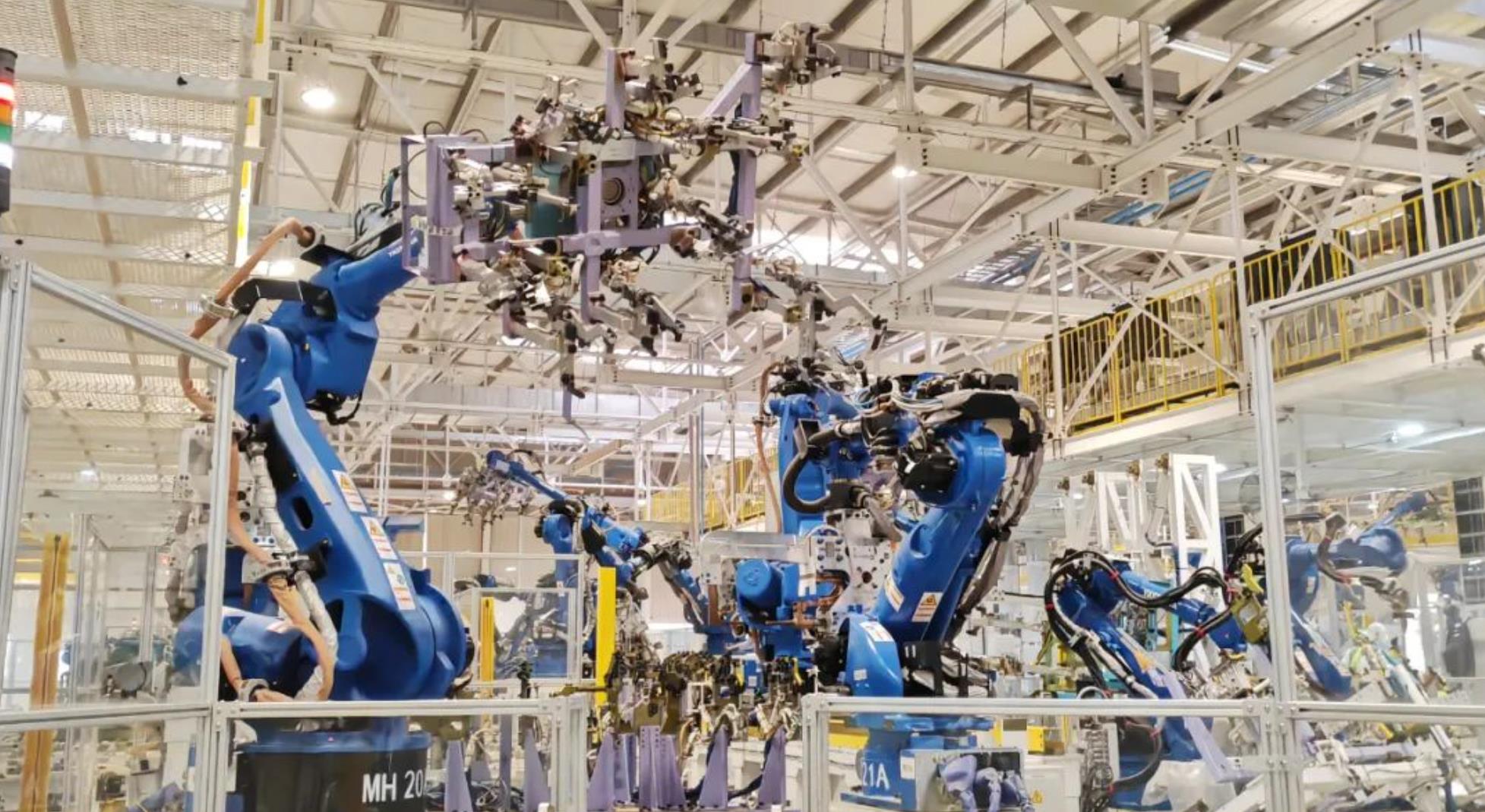
动态 东风本田全球首个纯电智能工厂厂区建设进入收尾阶段 导读:1月12日,东风汽车宣布,东风本田全球首个纯电智能工厂厂区建设已进入收尾阶段。图片来源:东风汽车据了解,新车间具... 浏览量:1747 -
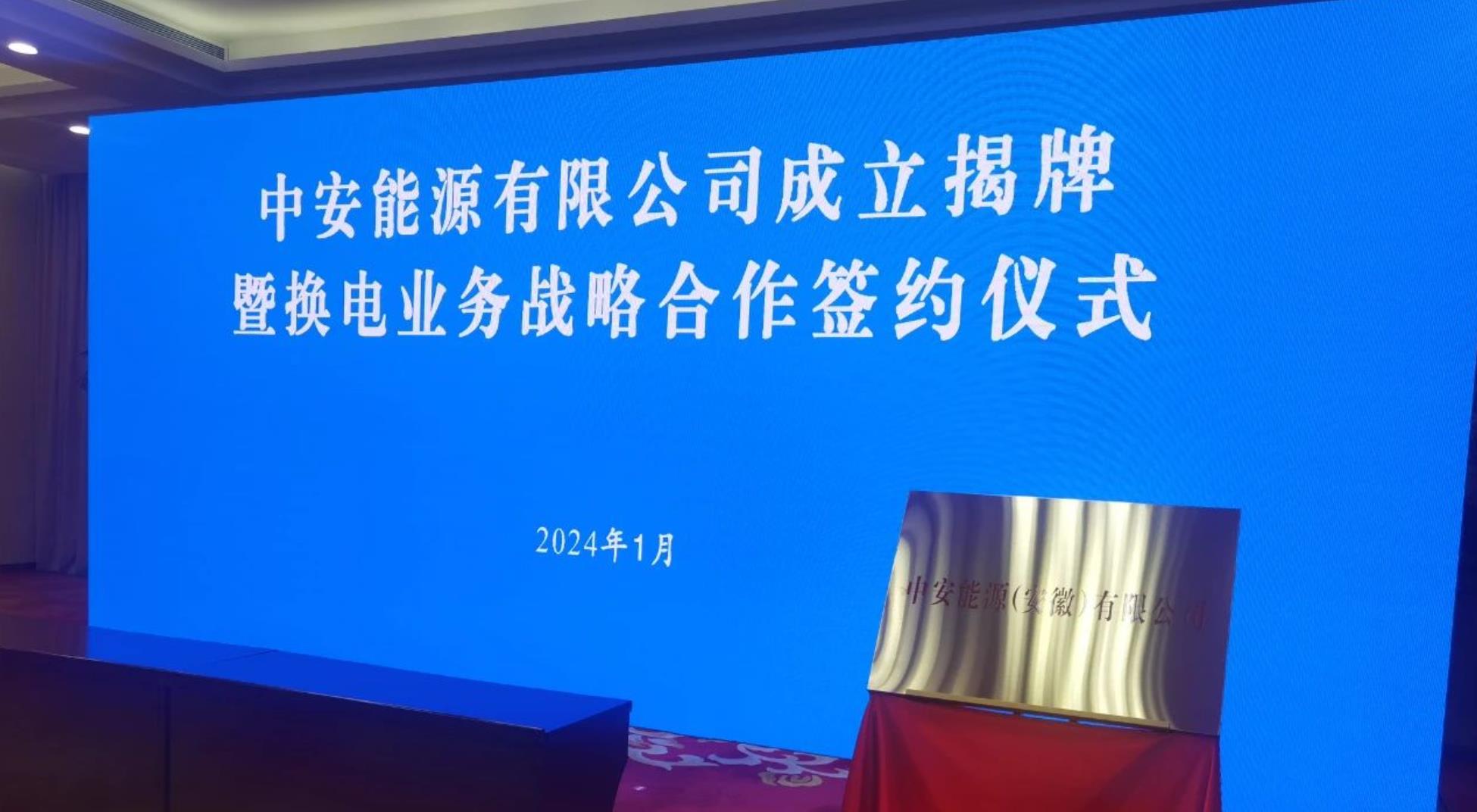
行业 蔚来与奇瑞、江淮汽车达成换电合作协议 导读:1月11日消息,据合肥日报公众号显示,中安能源有限公司在合肥揭牌。图片来源:安徽日报据了解,该公司由安徽省能源集... 浏览量:2164 -
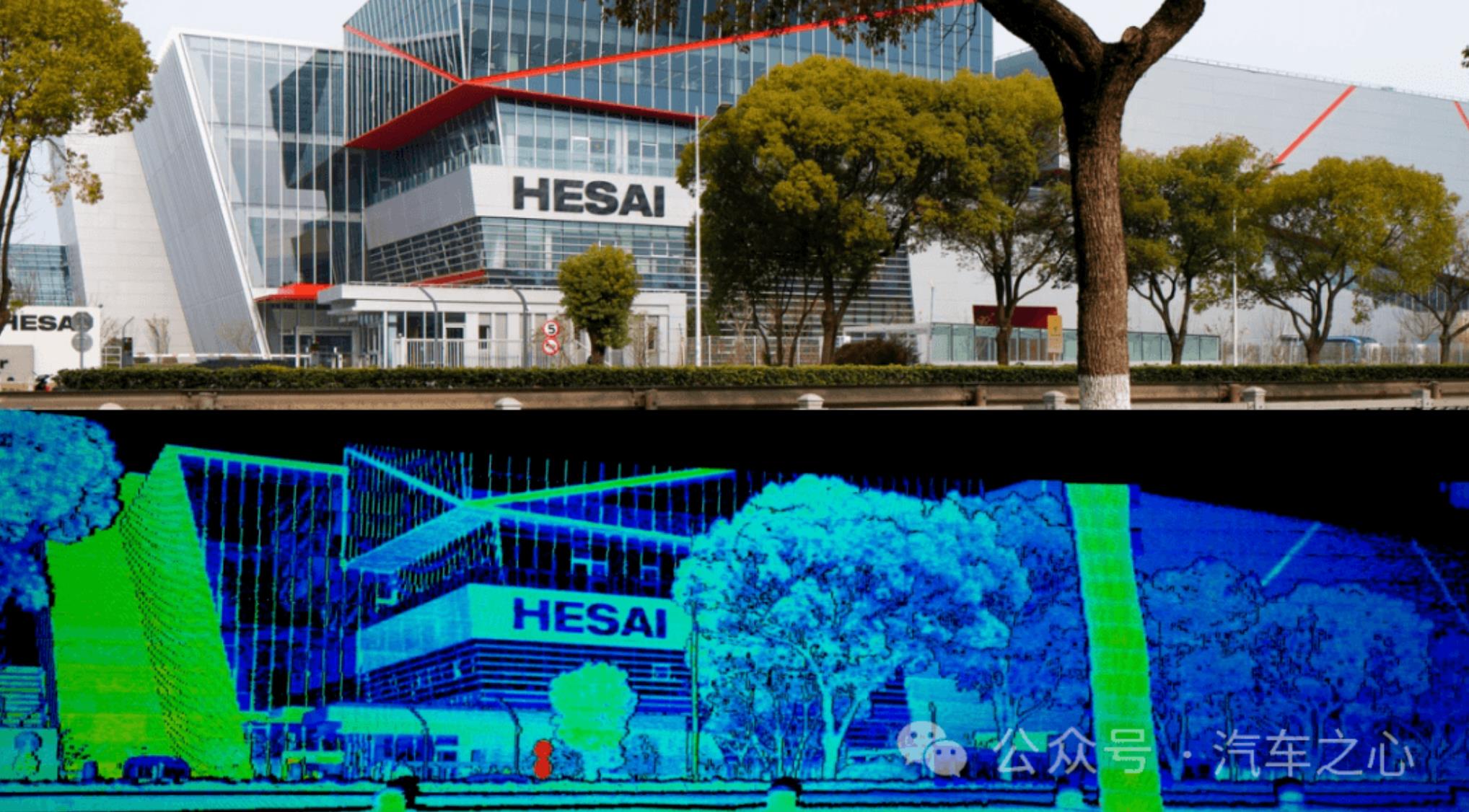
行业 禾赛发布性能王牌产品:512线激光雷达,最远探测距离400米 导读:1月9日,禾赛科技正式发布面向搭载智能驾驶系统量产车市场的「性能王牌」产品——512线超高清超远距激光雷达AT512。作为禾赛AT系... 浏览量:2056



















哪些因素对汽车座椅舒适性很重要? - 雷竞技下载贴吧热处理工艺设计的依据及热处理工艺设计的基本内容
- 热浸锌和机械镀锌的区别是什么?
- 雷竞技下载贴吧采购需要注意哪些关键点?
- 造车到底需要多少钱?
- 国内外自动驾驶仿真软件有哪些?
- 为什么自动驾驶系统需要车载以太网?
- CAN总线原理?CAN总线是数字信号还是模拟信号?
- 电动汽车整车控制器原理及功能解读
- 大众ID.4 的车身及电池壳连接工艺解析


雷竞技bet汽车自动驾驶地图基础平台产业联盟在京正式成立 - 腾讯智慧出行与博泰车联网签署战略合作协议
- 百度Apollo展示了以文心大模型为基础的新一代AI智舱探索成果
- 雷竞技bet汽车数据治理创新中心在京成立
- 如祺出行获批广州开展雷竞技bet汽车示范运营资格
- 武汉光谷发起成立新能源雷竞技bet汽车企业联合会
- 到2025年,上海嘉定雷竞技bet汽车产业规模将达3000亿元
- 文远知行打造全国最大自动驾驶微循环公交接驳体系
- 上海雷竞技bet汽车测试里程已超1300万公里
- 智能手机+四个车轮=智能汽车?








主题:中国(深圳)电池新能源产业国际高峰论坛
时间:2023年12月4日-7日
地点:深圳国际会展中心希尔顿酒店(宝安区展丰路80号)





















