导读:来到陌生的城市旅游,通过提前查看攻略准备去当地特色景点游玩,面对从未来过的城市,你很熟练地拿出手机,在导航App内输入你想去的地点,导航App便立刻给你提供完善的出行建议,让你可以根据需要进行选择,并贴心地给你提供附近的停车点、用餐点、加油点、购物点等信息,让你有需要时可以很快找到,而你也由于导航App的帮助,在陌生的城市完全可以方心游玩,这就是导航的常见用处所在。

自动驾驶汽车概念的提出,让汽车独自完成行车任务成为了现实,自动驾驶主要是通过感知、决策和执行三个主要行为来实现。

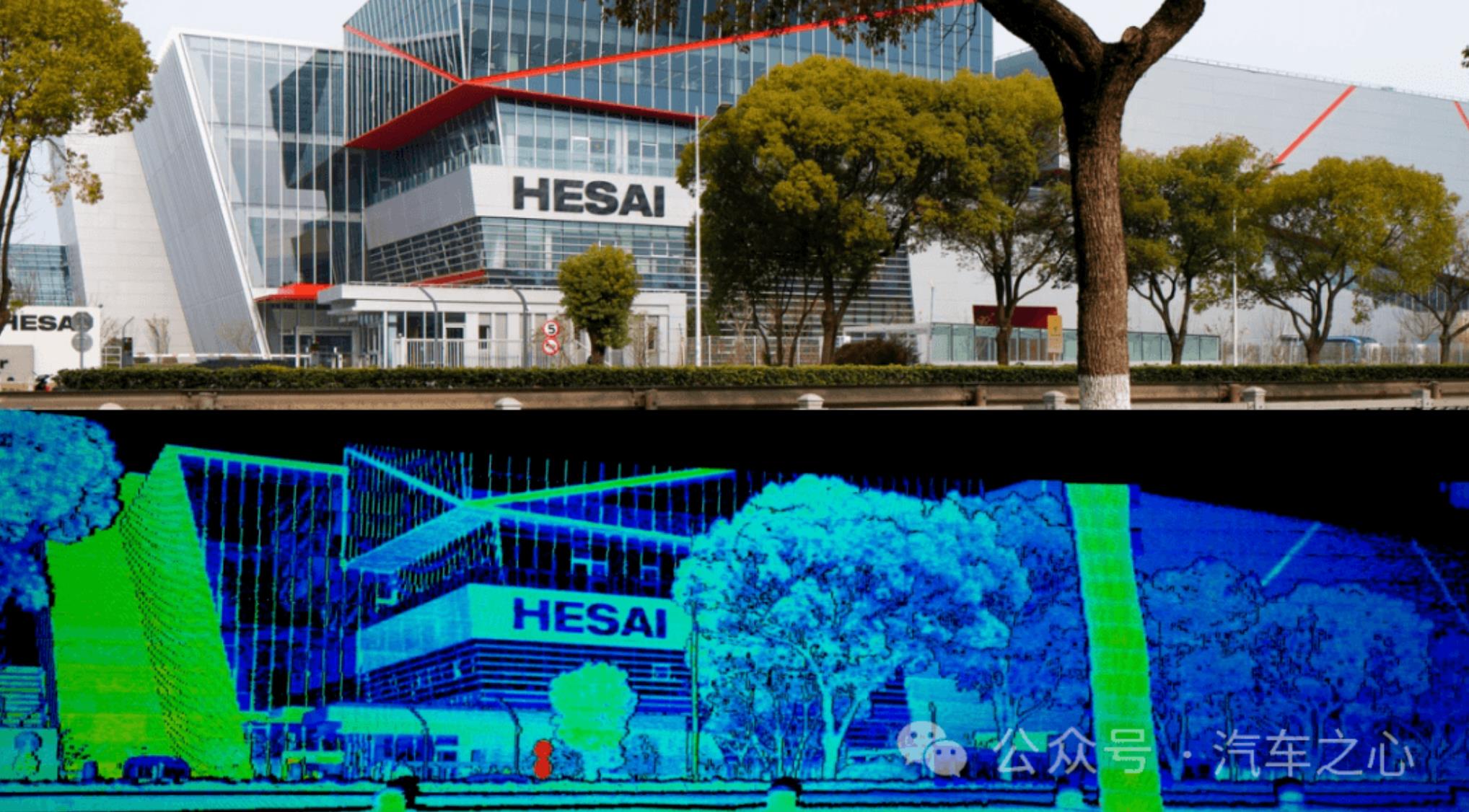
感知就像人类通过眼睛和耳朵感知周围情况,自动驾驶的感知是通过激光雷达、毫米波雷达、高清摄像头等硬件设备的周围感知及通过GNSS(全球导航卫星系统)、IMU(惯性测量单元)、RTK(实时动态)定位等绝对位置定位组成,用来搜集车辆周边的环境。
决策就像是人类通过眼睛和耳朵接受到的信息,对下一步的动作做出预判,车辆的决策主要包含行为决策、路径规划和相对位置定位(周围感知+高精度地图),通过感知获取的道路信息,对方向盘、加速踏板、制动踏板等决定车辆行为的设备进行决策控制。自动驾驶决策主要以感知信息数据为基础,计算出经过优化的驾驶决策。
执行就像是人类行走时的手和脚,自动驾驶汽车基于决策层给出的驾驶决策,自动驾驶汽车的反向盘、加速踏板、制动踏板做出相对应的执行动作,从而确保自动驾驶车辆可以安全地完成自动驾驶任务。
一、高精度地图特点
当使用自动驾驶汽车时,输入预到达的目的地,自动驾驶汽车首先要做的就是道路的规划和导航,就像我们在陌生城市旅游时,通过导航App来进行道路的选择和规划,但与导航App不同的是,导航App更注重的是街道名称及路径等信息,只记录道路级别的数据:道路形状、坡度、曲率、铺设、方向等。自动驾驶车辆所需的是高精度地图,高精度地图不仅增加了车道属性相关(车道线类型、车道宽度等)数据,更有诸如高架物体、防护栏、树、道路边缘类型、路边地标等大量目标数据。高精度地图能够明确区分车道线类型、路边地标等细节,给自动驾驶车辆在行驶过程中提供必要的信息提示。

此外,高精度地图精度更高,不同于导航App米级导航,高精度地图的精度要求达到厘米级(Google等高精度地图精度在10-20厘米级别)。导航App的作用就是辅助导航,本质上与传统的纸质地图类似,而高精度地图通过“高精度+高动态+多维度”数据,其目的是为自动驾驶提供自变量和目标函数的功能。
高精度地图对数据的实时性要求更高。根据博世在2007年提出的定义,无人驾驶时代所需的局部动态地图(Local Dynamic Map)根据更新频率划分可将所有数据划分为四类:永久静态数据(更新频率约为1个月),半永久静态数据(频率为1小时),半动态数据(频率为1分钟),动态数据(频率为1秒)。导航App可能只需要前两者,而高精地图为了应对各类突发状况,保证自动驾驶的安全实现需要更多的半动态数据以及动态数据,这大大提升了对数据实时性的要求。精度地图是高鲜度、高精度及高丰富度的集合,不论是动态化,还是精度和丰富度,其目的都是为了让自动驾驶汽车能够安全、高效行驶,动态化的高精度地图可以保证自动驾驶汽车在行驶过程中及时、有效地面对突发状况,并选择最优的行驶路径,让自动驾驶汽车可以安全将乘客送达预定目的地。
二、高精度地图的定义
高精度地图通俗来讲就是精度更高、数据维度更多的电子地图。精度更高体现在精确到厘米级别,数据维度更多体现在其包括了除道路信息之外的与交通相关的周围静态信息。高精度地图将大量的行车辅助信息存储为结构化数据,这些信息可以分为两类。第一类是道路数据,比如车道线的位置、类型、宽度、坡度和曲率等车道信息。第二类是车道周边的固定对象信息,比如交通标志、交通信号灯等信息、车道限高、下水道口、障碍物及其他道路细节,还包括高架物体、防护栏、数目、道路边缘类型、路边地标等基础设施信息。以上这些信息都有地理编码,导航系统可以准确定位地形、物体和道路轮廓,从而引导自动驾驶车辆行驶。其中最重要的是对路网精确的三维表征(厘米级精度),比如路面的几何结构、道路标示线的位置、周边道路环境的点云模型等。有了这些高精度的三维表征,自动驾驶系统可以通过比对车载的GPS、IMU、LiDAR或摄像头的数据精确确认自己当前的位置。另外,高精度地图中包含有丰富的语义信息,比如交通信号灯的位置和类型、道路标示线的类型、以及哪些路面是可以行使等。
三、高精度地图的重要性
高精度地图除了在自动驾驶汽车行驶时提供导航作用外,还为自动驾驶汽车的安全行驶发挥了极大作用。现在自动驾驶汽车行驶过程中的信息采集主要是通过激光雷达、毫米波雷达及车载摄像头等对道路状态进行信息采集,其中车道线的采集也是其中一个参考目标,但部分道路由于长期没人维护,车道线就会磨损消失,自动驾驶汽车缺失了这一参考目标就及容易让车辆的行驶偏离预定行驶车道,高精度地图的辅助,就可以让自动驾驶汽车保持在一个车道内行驶。在雨雪、大雾等极端天气下,硬件设备的信息采集也会出现一定程度的失效,为了保证自动驾驶汽车行驶过程中的安全性,高精度地图就可以有效进行信息的补充,而且在复杂的道路环境下,仅仅依靠硬件设备的信息采集是无法分辨出红绿灯信息及车道信息的,高精度地图的出现就可以让自动驾驶汽车获得更多的道路信息,从而让自动驾驶汽车实现动态的自动控制。

而且在一些如多层立交、隧道等复杂的道路场景下,为了能够让自动驾驶汽车安全地行驶,利用高精度地图,结合视觉毫米波雷达、激光雷达等无源定位的无源传感器,实现自主定位,这种融合定位的方式,会在实际使用过程中大大提高自动驾驶的安全性。
多变的道路状况也是高精度地图使用的必要原因之一,如部分城市为了有效改善交通环境,会设置潮汐车道等特殊的交通规则,还会对比分道路设置限速,此时就需要使用高精度地图提前进行路径规划,让自动驾驶汽车遵守交通规则。而且还可以借助高精度地图提供的信息,对道路状况进行预测,如在车道合并的路况下,高精度地图就可以查询到辅路入口或者车道线合并的情况,从而提前做出预判,高精度地图也可以根据左右车道的虚实线情况,判断旁边车辆加塞的可能性。
四、高精度地图面临的问题
高精度地图现阶段还没有统一的标准,都是各主车厂对各自的高精度地图进行信息的采集,相互之间并无法共用,这就增加了各主车厂的采集成本。建立统一高精地图的数据模型与交换格式,将有助于减少汽车制造商的开发时间和不必要的成本,同时保证未来跨品牌车辆使用的高清地图都可以不断共享刷新数据。高精度地图的采集成本较高,而且更新也比较慢,现在阶段,高精度地图采集测绘数据的方式主要有2大技术路线,一种以谷歌的地图测绘车为代表,另一种则以特斯拉的“车队学习网络”(FleetLearning Network)为代表,相当于利用量产车,把测绘任务“众包”出去,调动整个车队的所有传感器来收集数据,并通过云技术上传到中央数据库,最终每一辆车都是地图数据贡献者,也是获得者。自动驾驶的发展需要多种软件、硬件技术的融合,也需要法律法规的建立,自动驾驶是汽车发展的趋势,但也不是一蹴而就的。
来源:智驾最前沿