导读:2021年12月17日,由佐思汽研主办的2021佐思智能汽车年会暨金智奖颁奖典礼在苏州召开。四维图新高精度地图凭借优异的产品表现,赢得了2021年度金智奖“技术领先奖”。 会上,四维图新地图产品设计部副总经理孙静女士做了《高精度地图助力自动驾驶场景落地》的主题演讲,赋能智慧出行,助力美好生活。

金智奖由佐思汽车研究院发起评选,旨在鼓励中国汽车产业由大做强,促进中国汽车产业转型升级、打造更具竞争力的整零协同创新关系,助力实现汽车强国并做出积极贡献的头部企业。
四维图新高精度地图
四维图新提供面向多等级自动驾驶的高精度地图“数据+引擎”产品服务,高精度地图全球率先通过ASPICE CL3评估;融合导航地图、ADAS地图、停车场地图、高精度地图,提供一站式OneMap地图服务,支持宝马、戴姆勒、沃尔沃、嬴彻科技等主机厂量产打造自动驾驶应用解决方案。 会上,四维图新地图产品设计部副总经理孙静女士做了《高精度地图助力自动驾驶场景落地》的主题演讲。

以下为演讲稿部分内容。 四维图新成立于2002年,致力于以自动驾驶系统解决方案、云服务平台、高精度地图、高精度定位以及汽车电子芯片等核心业务,打造“智能汽车大脑”,赋能智慧出行,助力美好生活,致力于成为客户信赖的智能出行科技公司。
一、高精度地图解决自动驾驶的功能痛点
高精度地图需要做什么?解决哪些问题和痛点?
第一点,首先解决物理传感器感知的失效问题,为感知提供更好的增强及有效的冗余,比如,信号交通灯的精准控制、感知信息在现场或既定环境下的遮挡或不清晰。
第二点,解决各种复杂场景定位传感器的遮挡问题,高精地图的品质指标是处于较高水平,能够有效的弥补车辆定位传感器的失效场景,降低定位失效率。
第三点,高精度地图是超视距传感器,用来弥补视觉传感器的不足,它能够提供车道级的路径规划、速度的控制、姿态的控制等;比如,做超车控制时,可以为超车后的场景提供预测控制参考,也可以为车道变换前提供车速控制依据。同理的情况还包括前车遮挡、高曲率路段、天气环节等视觉传感器的各种失效场景。
第四点,高精度地图还可以提供现场差异化的驾驶规则,以及在一些复杂场景下辅助决策。
总体来说,当车辆对环境的感知越清楚,自动驾驶系统的安全性就越高,效率也就越高。地图本质上就是补充感知能力,提供预测感知信息及视觉感知不到的规则信息。

二、超视距传感器,自动驾驶风险控制
高精度地图除了可以解决上文提到的实用性问题外,还可以解决风险性问题。比如高速公路,在大多数人的认知里高速公路是封闭的场景,不会有车流交汇,但在实际大规模量产的时候,发现了大约1000+的特殊场景。比如高速上出现调头口、平面交叉口、并行路段,特殊的标线、非正常开口等等导致正常自动驾驶感知异常的情况,此时高精度地图可以为车端提供这些场景的提前感知和警示。

三、四维图新高精度地图研发进展
四维图新的产品研发,涉及不同的场景,包括面向广域高速、城市高速和城市普通道路,也涉及多种在线服务。
四、支持自动驾驶全场景的高精度地图产品组合
在地图数据方面,四维图新可以提供自动驾驶全场景高精度地图的产品组合,在统一的路网框架之下,基于ADAS Map、HD Lite Map、HD Pro、AVP等多种地图产品,实现点对点的L2、L2+、L3到L4的完整的自动驾驶数据服务。

五、L3级别高速自动驾驶地图
自动驾驶地图本质上是将现实世界抽象成可以被自动驾驶汽车理解的数据集合。目前已经开发完成的基于高速HD Pro的产品有100多种地图要素,包含基础信息、精细化图层以及安全方面的图层。通过不同的维度制作,涉及基础特征、深度表达、精细化、功能安全等多种维度,覆盖全国高速公路,适用于L3级别自动驾驶场景。
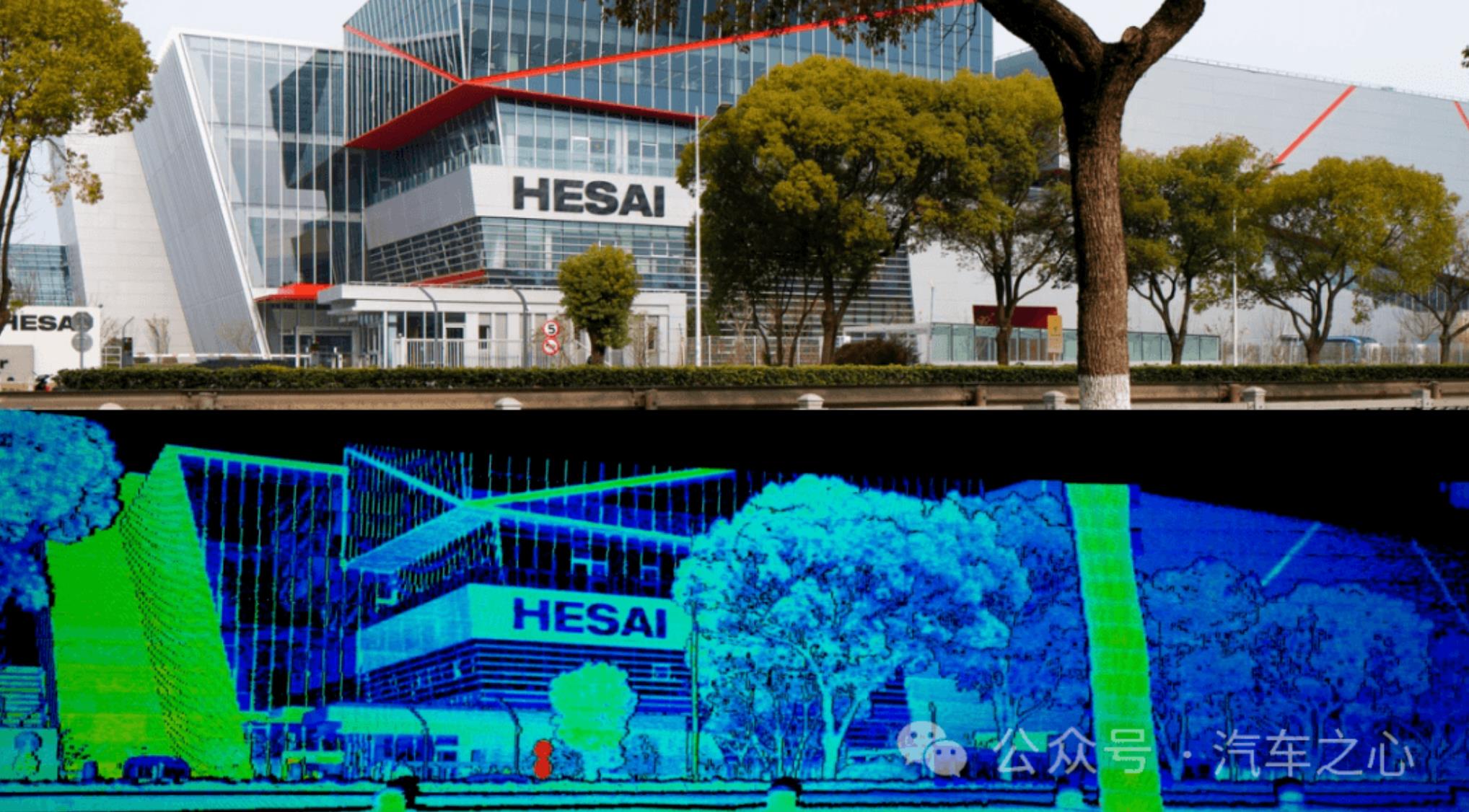
如下图所示,高精度地图的要素多,精度高,数据量大,因此自动化生产扮演了非常重要的角色。

采集完成之后的原始点云数据:
第一步,进行降噪处理,去除冗余的点云;
第二步,进行点云数据分类,用不同的颜色标注提取的对象或几何;
第三步,数据自动提取,可以从点云中提取到车道信息、路牌、信号灯等,HD地图包含100多种属性要素,大部分都是自动化提取的。
第四步,自动化提取完成后,进行自动化检查和人工验证,确保准确度。
其中,特殊车道边线、车道宽度变化、导流区、圆形标牌、桥墩、上方障碍物面等,普通导航地图中是没有的,只有高精度地图才制作这些信息。
最后呈现的结果不带点云,有道路几何并赋予了语义信息的高精度地图。
接下来给大家介绍使用UGC数据的Map Learning地图更新体系。
1、在信度下降到一定程度的地区将触发地图更新,把更新地图的任务分配至合作伙伴车辆。
2、当车辆经过此段区域时,车辆传感器会自动实时感知数据,自动上传数据。
3、上传数据后,系统对数据进行获取、分类和识别。
4、根据车辆回传的数据结果判断使用哪种采集方式更新。如果是数据的删除类,就直接用众包数据结果删除即可。
5、通过地图学习检测到的新道路和大面积属性变化,由采集车辆进行现场更新。
6、通过HDMS平台实时发布更新的地图数据。
六、中国普通道路比高速自动驾驶价值更高
目前,对高速公路的开发日渐成熟之后,也开启了普通道路的高精度地图开发,相比高速公路,普通道路的驾驶成本高,更容易推广和价值体现。

七、HD Lite™ : 支持L2+的城市高精度地图
关于HD Lite,是面向于支持L2+自动驾驶地图服务的HD Lite产品,也是这两年四维图新的主要开发产品之一,今年将计划覆盖14万km,并将在未来2年快速扩展。
HD Lite可涵盖所有基础要素,支持车道级路径规划、速度控制、高精度定位、可以还原丰富的驾驶场景。HD Lite是也是连接L3与L4场景的枢纽。

八、支持L4的自主代客泊车地图产品
针对解决车主停车难、找车难的痛点,而开发了AVP地图,可以实现一键泊车,一键召车的功能;此外 ,AVP产品不仅提供高精度地图,同时支持基于点云以及基于视觉的定位特征图层,能够支持车端、厂端或者提供车、厂结合的不同解决方案。

九、四维图新自动驾驶地图整体解决方案
基于高精度地图对自动驾驶产业服务化,四维图新已经具备了从数据到云端,再到车端的整体解决方案。
在云端,搭建了数据发布平台,提供基于Map Learning更新体系及相应的仿真服务。
在车端,开发了感知模块、融合定位模块、交叉参考模块,基于动态大数据的路径规划,打通了地图数据的更新链路及OTA的升级链路。

十、车端SDK功能引擎
车端SDK功能引擎,可以支持无缝地图更新以及融合定位的功能。

十一、智能导航产品
四维图新第三代导航产品,这款产品结合高精度地图实现了IVI域和AD域的无缝衔接和互通。在导航场景下,基于高精度地图,它可以还原丰富驾驶场景,使驾驶者的沉浸感更强。
同时,基于多传感器,可以实时感知周边车辆的危险信息,实现导航过程中对风险的提醒和避让,使驾驶过程更安全。

作为国内率先布局高精度地图产品研发的公司,四维图新一直在高精度地图与自动驾驶应用的道路上探索、实践,推动汽车智能化解决方案的落地。
来源:佐思汽车研究